Over the years, quadruped – four-legged – robots led by the likes of Spot, by Boston Dynamics, have captured our imagination far and wide. These robots have been through various upgrades, including the robotic dog that can now walk, jump, and maneuver like the real thing. Even though the construction of these robots is already very sophisticated, it remains to be perfected for widespread applications.
A step forward in this direction can be a mouse robot with an articulated spine developed by collaborative research teams from the Technical University of Munich, University of Technology, Nuremberg, and Sun Yat-Sen University, China. The articulation of the spine allows the mouse named NeRmo full body control and stabilization, which provides it with a more balanced frame along with agility and gait much like a real rodent with a biological spine.
Designer: Zhenshan Bing

This mouse created with a flexible spine and tendons is the first interpretation of spine-centric quadruped, unlike the four-legged robots whose anatomical mimicking just finishes at the leg-based motor skills. Yes, they can walk, jump or even pull off a few dance moves, but the NeRmo can do that and more. While the others are robotic in their movement and approach, the researchers led by Zhenshan Bing, believe their mouse – with a spine and tendons running through it – can move almost alike and turn equally efficiently as its biological counterpart.
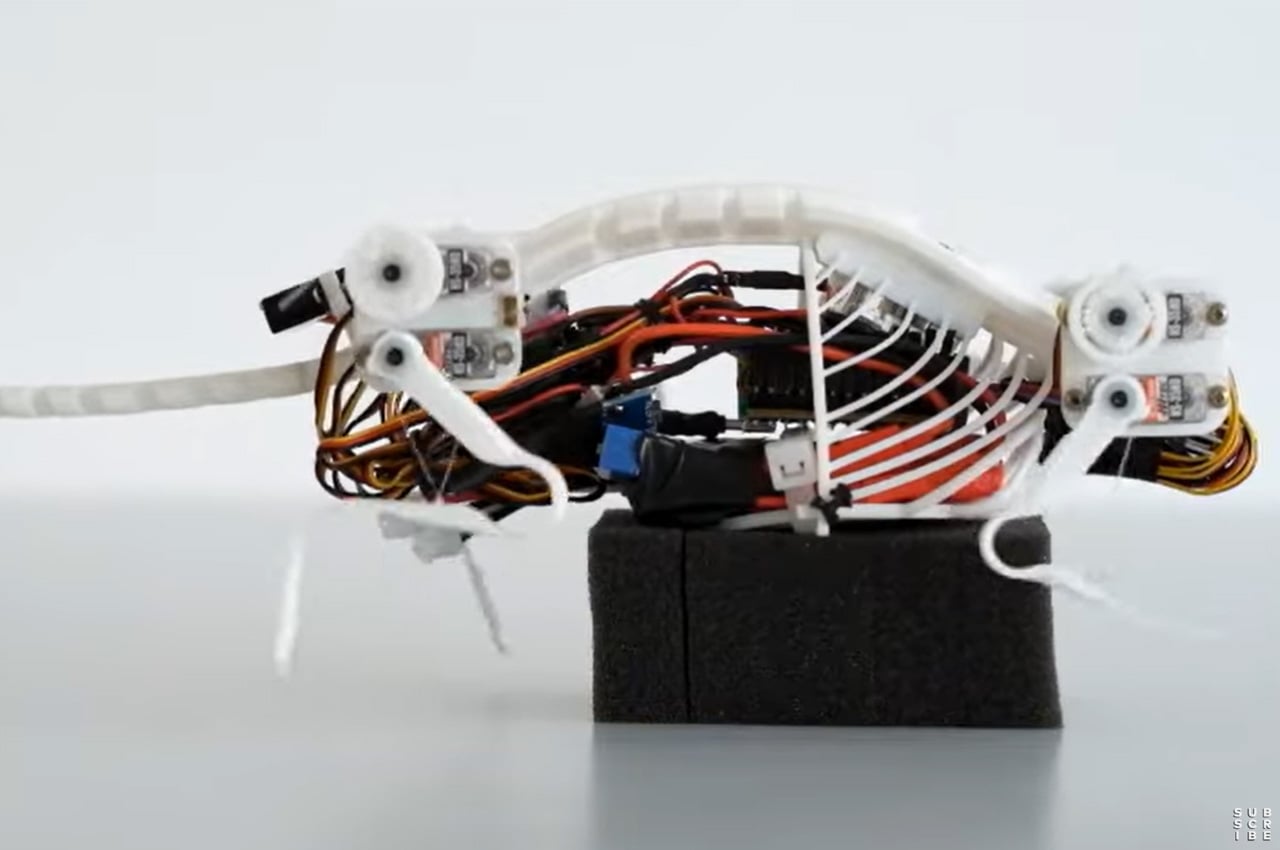
NeRmo is an agile-legged robot that leaves behind challenges of movement and regulating spine flexion that other quadrupeds using similar spine enhancement – like in the case of Boston Dynamics’ Cheetah robot – have proved. The robot with 3D printed parts and Raspberry Pi for its brain has a sensory system that can make decisions and navigate autonomously.
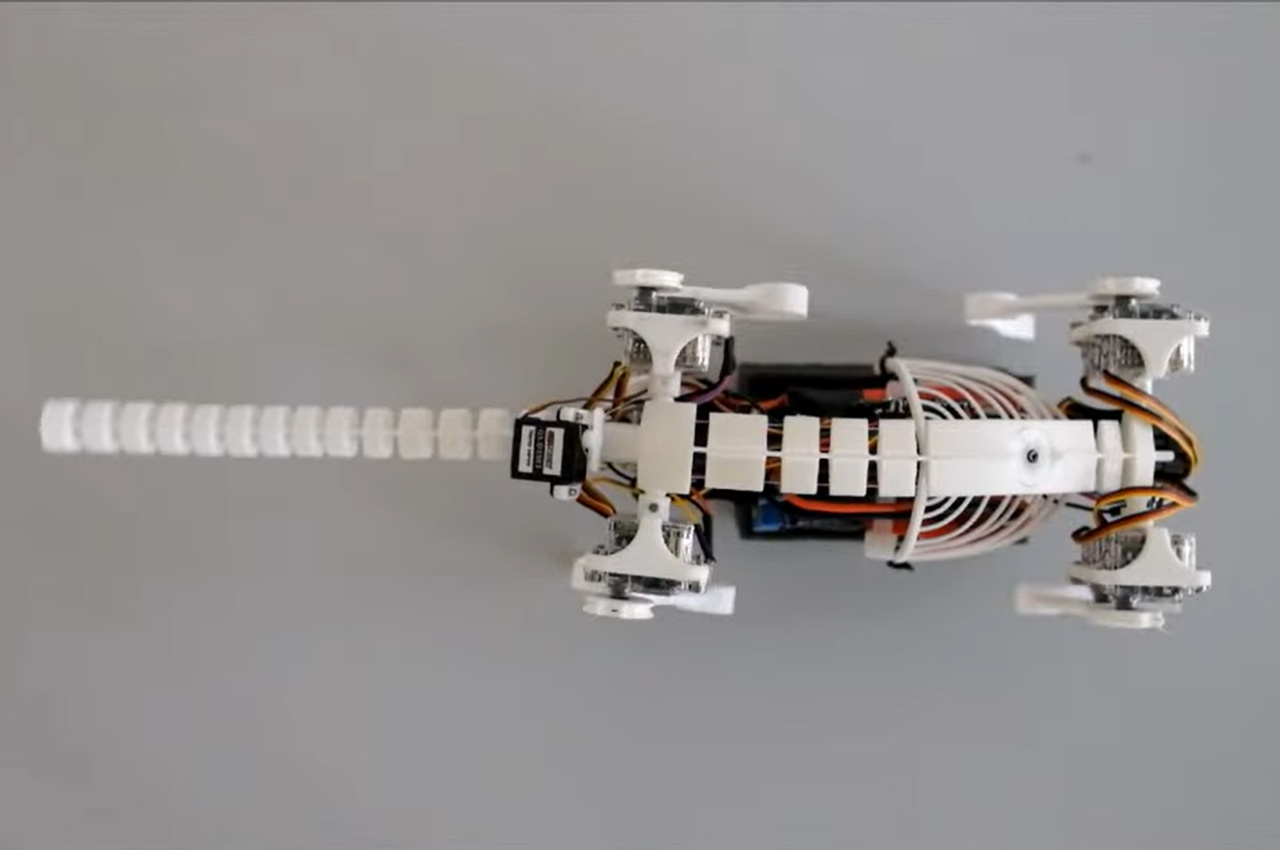
The NeRmo is an experimental robot that helps understand the spine-based quadruped locomotion skills. The findings are pretty optimistic, which means, that its development can be a promising inspiration for more such small agile-legged robots. The construction of the NeRmo modular robot, according to the research team is low cost, owing to its building process. With the articulated spine, the research shows, the robotic mouse can adjust its posture, extend its stride to walk faster, and make agile maneuvers in a small turning radius and while walking.


The post With an articulated spine this robot mouse can beat ‘Spot’ at pace and maneuvers in small turning radius first appeared on Yanko Design.
via https://ift.tt/ipsgvM6
Post a Comment
Note: Only a member of this blog may post a comment.